Dual-Drive Tri-Ring teethed cycloidal Actuator
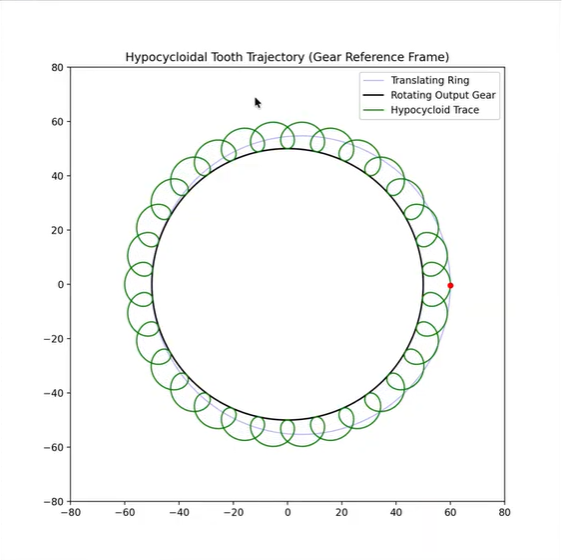
This mechanism is based on cycloidal motion, where the inner and outer discs interact through an inverted hypocycloidal-like path, as shown in the Python simulation.
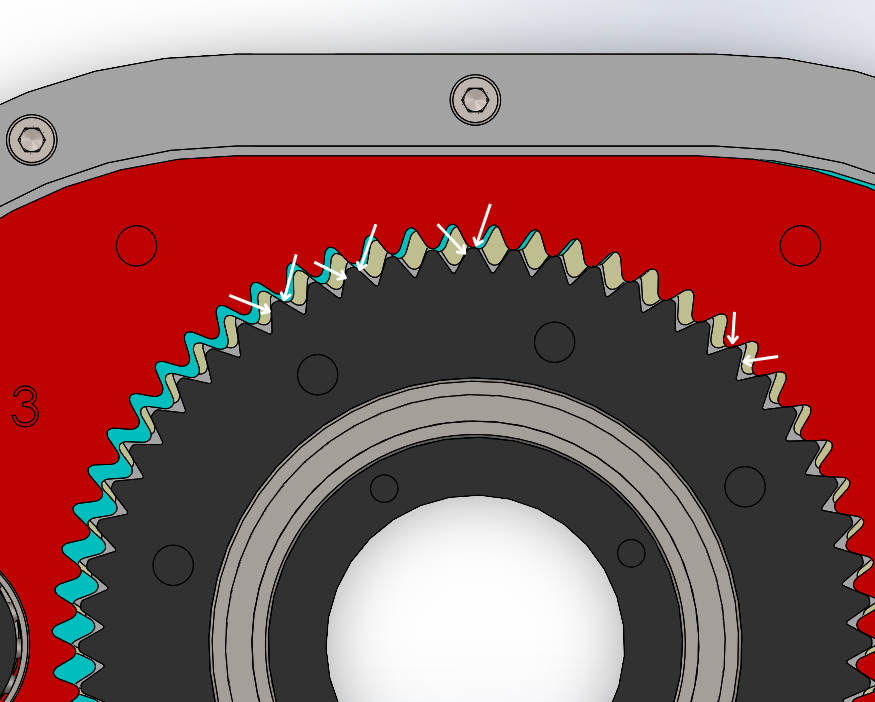
The reduction effect is generated by combining this motion with a small tooth-count difference between the inner and outer gears, enabling a high reduction ratio within a compact form factor.
I redesigned the tooth profile to promote smoother rolling contact and maintain continuous preload. This preload is achieved through the simultaneous engagement of the three plate teeth against the output gear teeth.
The combination of refined tooth geometry and controlled preload enables near-zero backlash, while maintaining consistent contact throughout the motion cycle.
High Torque Density
Achieved a 30:1 reduction ratio within a compact 160 × 130 mm housing.Low Backlash Operation
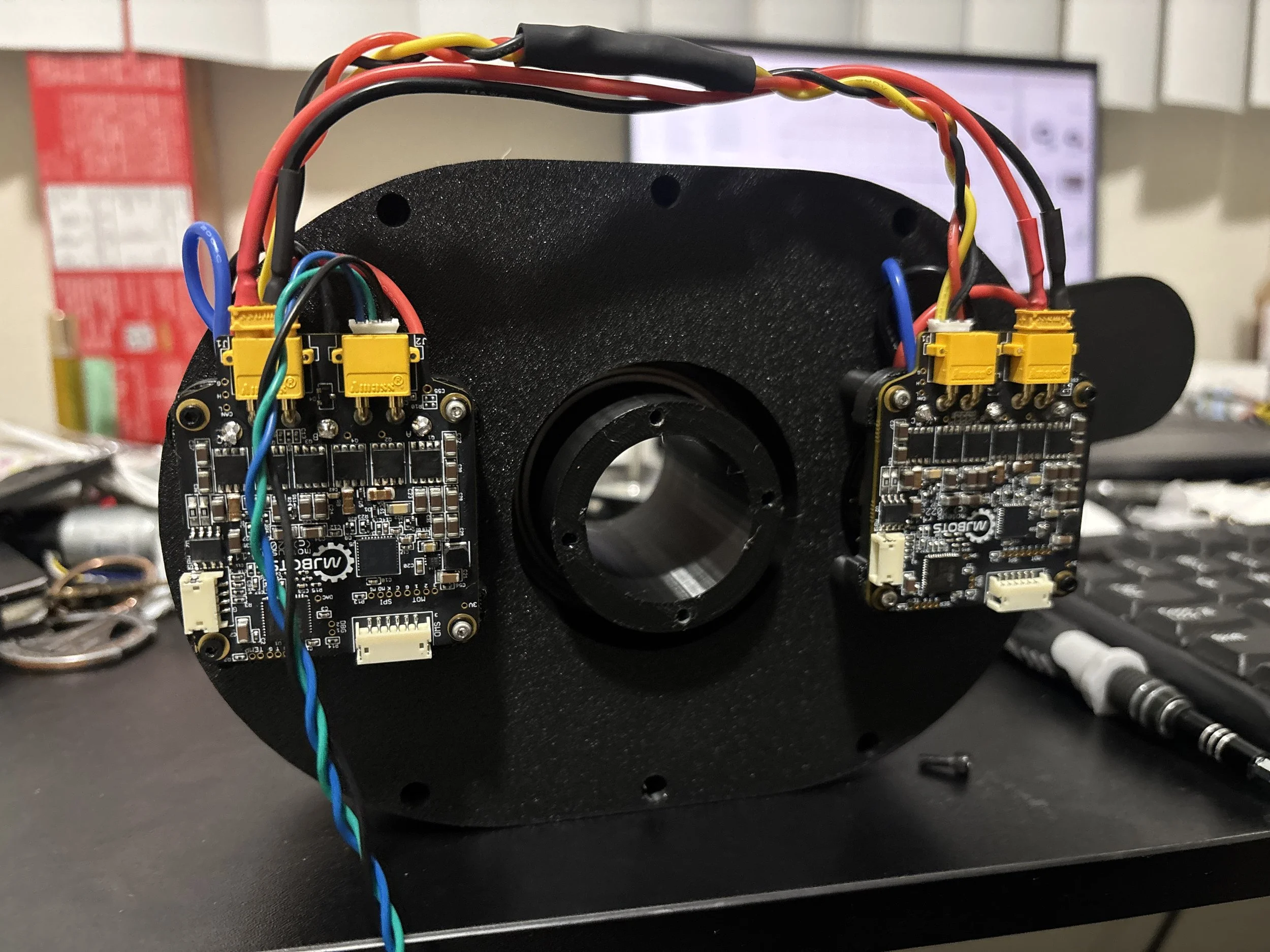
Redesigned tooth geometry and implemented a preload condition to maintain consistent engagement and minimize backlash.Dual-Input Drive System
Engineered a synchronized dual-input configuration to distribute torque across the motors.Design for Manufacturing (DFM)
Optimized part geometry for FDM 3D printing, focusing on printability and ease of assembly.
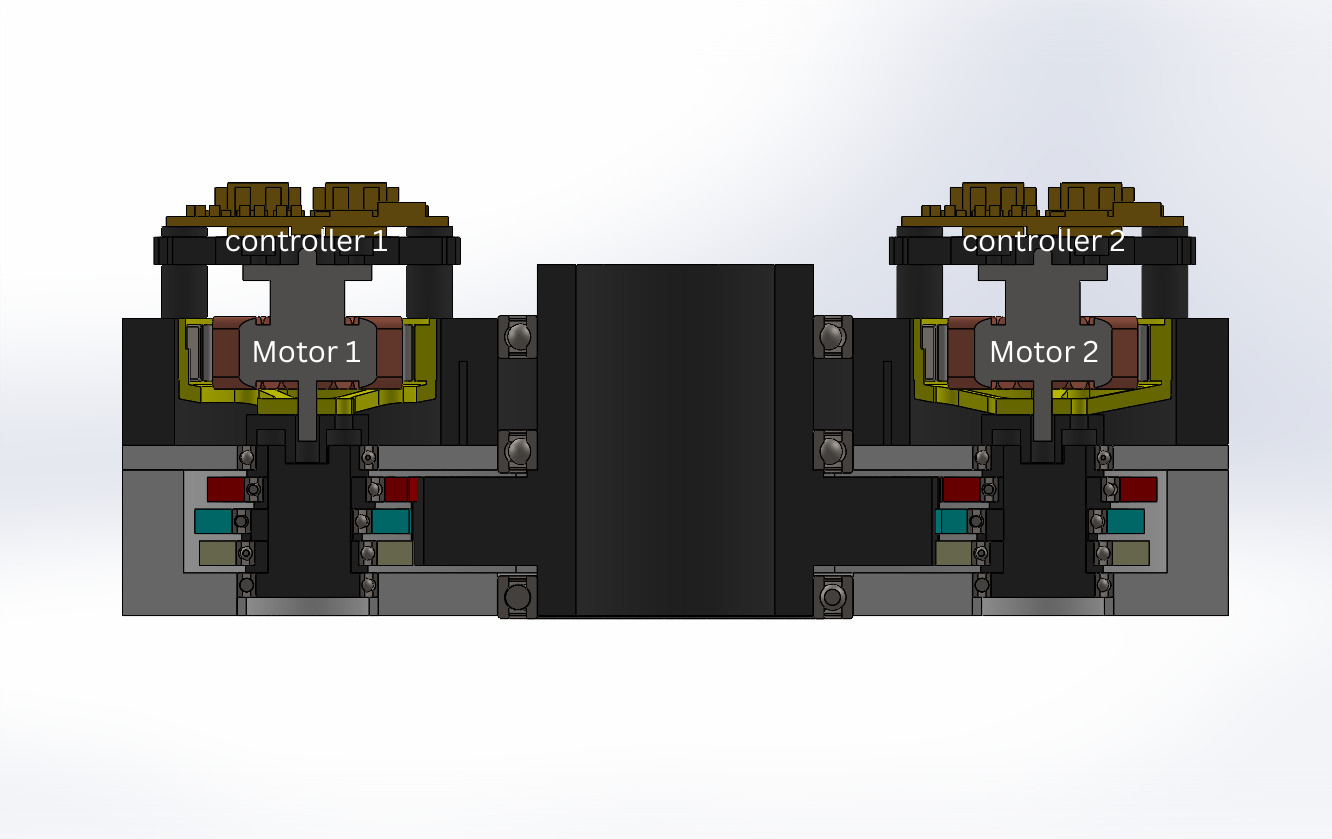
Mechanical Synchronization: Velocity and position of the two motors are physically locked via the internal linkage(plates), ensuring perfect phase alignment between the two BLDC inputs without complex electronic master-slave lag.
Active Torque Compensation: Implemented a custom algorithm to maintain a 50/50 (±5%) load distribution. This prevents one motor from "carrying" the other, maximizing the thermal efficiency and lifespan of both power units.
Efficiency Gains: By splitting the torque, the system operates in a more efficient region of the motor’s torque-speed curve, reducing heat buildup during high-torque hold patterns.
Developed a test rig to measure and validate motor peak torque to avoid overload when testing
Used the setup to validate motor performance against manufacturer specifications
Tuned the PID controller to achieve stable and responsive motor behavior under load
Verified consistent operation of both motors prior to system integration
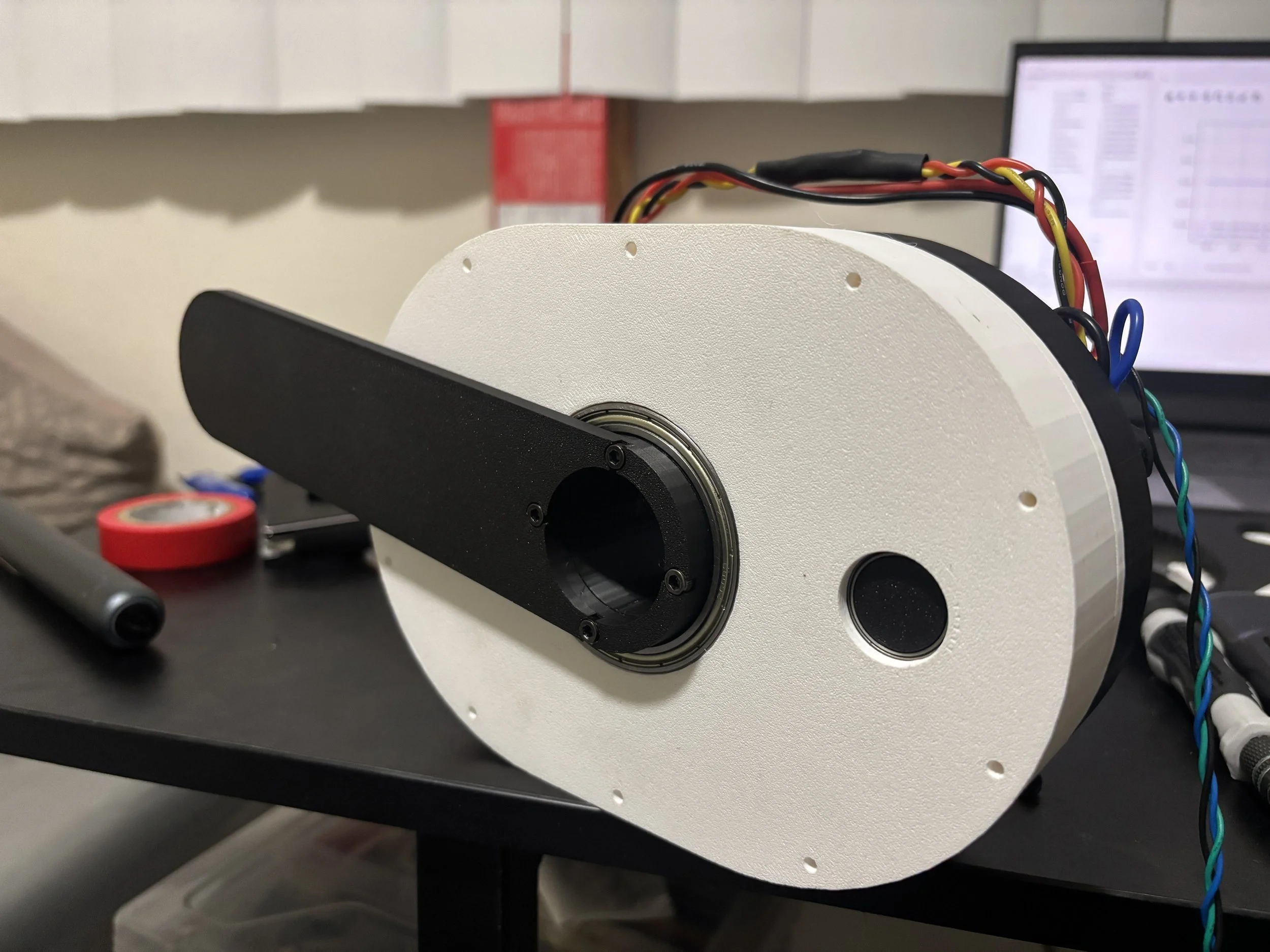
Fully assembled 3d printed dual-input cycloidal reducer with integrated housing and aligned drive components.
Front and rear views highlighting the compact form factor and structural layout

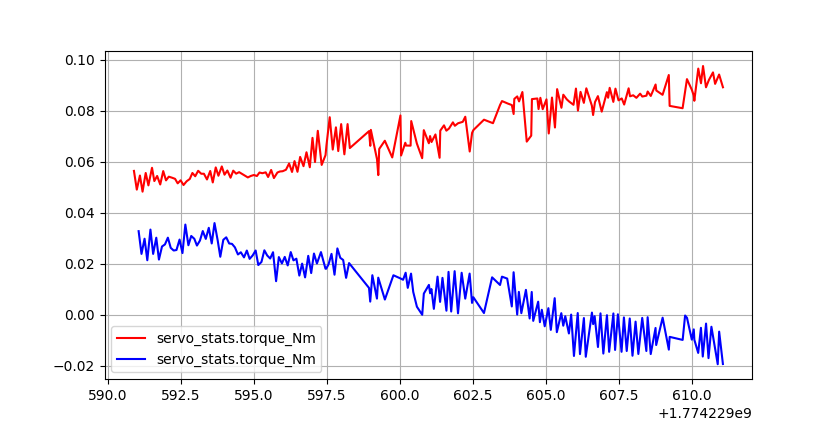
Initial testing showed uneven load distribution between the two motors, with one motor carrying a larger portion of the torque (top plot)
Implemented a torque compensation algorithm to actively balance the load between both inputs
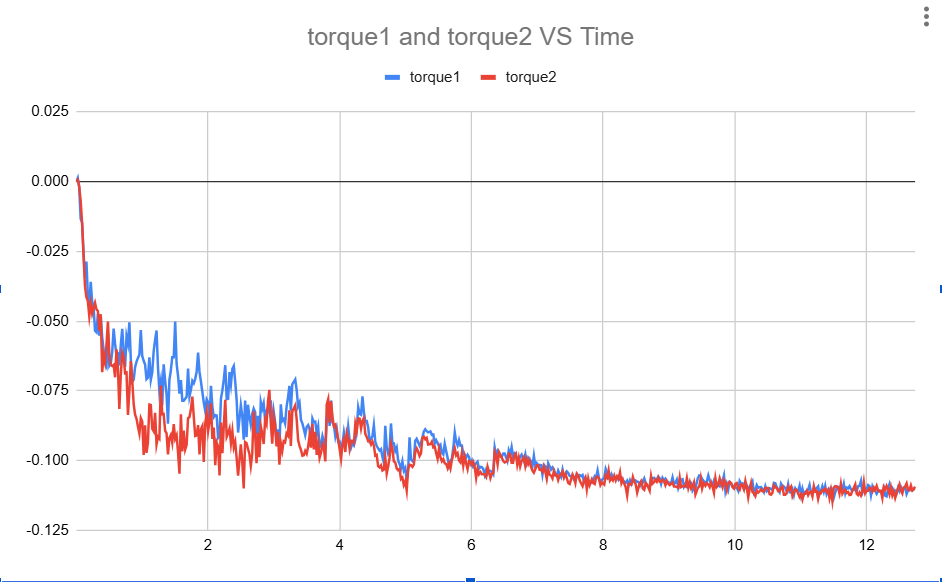
Post-compensation results demonstrate a more uniform torque distribution, approaching a 50/50 split between motors (bottom plot)
Improved load sharing reduced peak loading on individual motors and resulted in more stable system behavior
Material Upgrade
Transition from 3D printed components to machined aluminum parts to improve stiffness, reduce deformation under load, and enable a more compact and precise architecture.Precision & Tolerance Control
Improve dimensional accuracy through machining to reduce backlash and enhance consistency of tooth engagement and preload.Control Optimization (PID Tuning)
Further refine PID parameters to improve response time, reduce oscillations, and achieve smoother torque control under varying load conditions.Improve the torque compensation algorithm by upgrading from proportional control to a PID-based approach for more accurate and stable load sharing between motors.
The fully functional actuator was tested with a 1.8 kg load, demonstrating stable and repeatable performance across multiple cycles.
The system maintained continuous motion throughout the lifting and lowering phases, with no observable loss of engagement or interruption in torque transmission.
The actuator exhibited consistent behavior under load, indicating reliable interaction between the cycloidal discs and output stage.
The test also confirmed that the dual-motor configuration provided sufficient torque capacity while maintaining smooth operation.